
En la última publicación de esta serie abordé todos los aspectos técnicos y modificaciones del montaje. En esta ocasión cubriré lo que probablemente fue la parte más divertida del proyecto: el ensamblado.
Impresión de piezas
La primera parte de este proceso consistió en imprimir todas las piezas utilizando una impresora 3D; en mi caso, una Flashforge Adventurer 5M. Realicé algunas pruebas y ajustes con PLA, pero para las piezas finales utilicé PETG.
Para la impresión, empleé una configuración orientada a darle mayor rigidez y resistencia a las piezas, aumentando el número de capas exteriores y el porcentaje de relleno.
Ensamble mecánico
Una vez impresas las piezas, el siguiente paso consistió en unir todo con sus tornillos correspondientes (la lista de materiales se encuentra disponible en el post anterior). Para el ensamblado me apoyé en la guía de Simon Rob, disponible en el siguiente enlace:
https://www.instructables.com/Equatorial-Mount-for-DSLR/
Debajo se incluyen algunas imágenes del ensamblado final como referencia documental.



Sistema de contrapeso
Una parte fundamental del sistema es el contrapeso, que permite equilibrar el telescopio. Esto es importante, ya que evita el sobreesfuerzo del motor: en el punto de equilibrio, la fuerza necesaria para mover el eje es mínima.
En mi caso, utilicé arandelas para construir la pesa. Antes de instalar el motor, me aseguré de que el telescopio y el contrapeso estuvieran perfectamente balanceados. Esto es clave, ya que el motor introduce cierta resistencia y, una vez instalado, incluso apagado, resulta más difícil ajustar el equilibrio.

Ensamble eléctrico
Para el armado del control (la lista de componentes está en el post anterior), elaboré unas tablas que me sirvieron como guía durante el proceso y como referencia para el armado definitivo fuera del protoboard:
Una vez conectado todo, el control prototípico se ve de la siguiente manera:
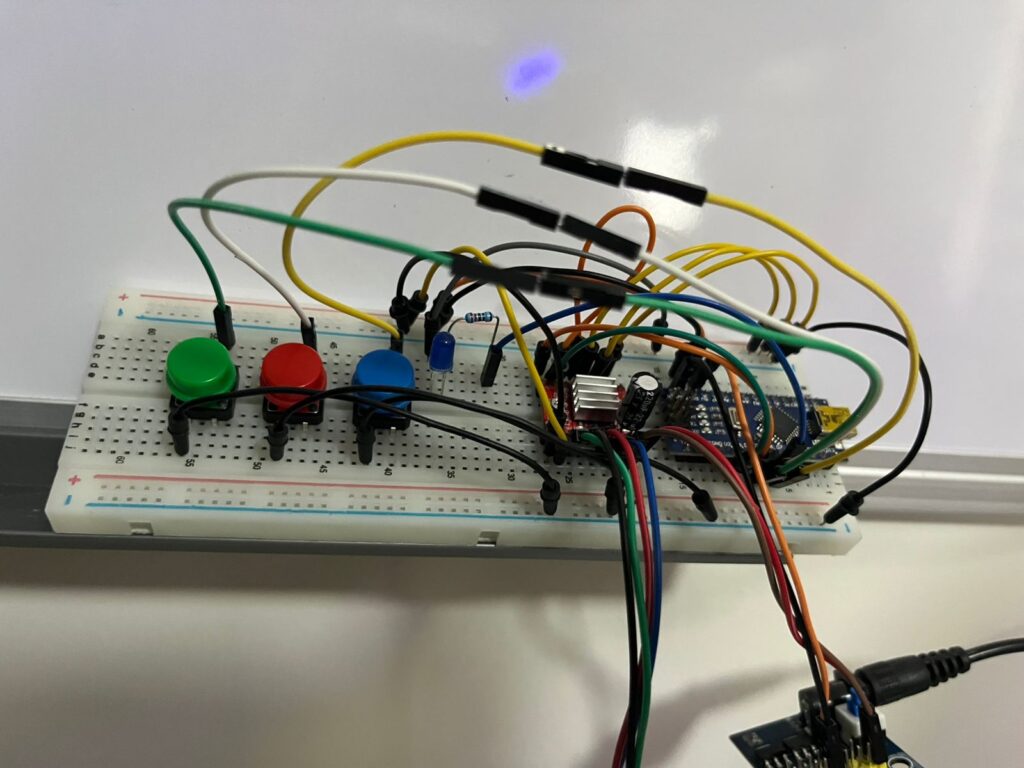
El botón verde controla el movimiento manual en dirección este; el botón rojo, el movimiento manual en dirección oeste; y el botón azul activa o desactiva el seguimiento automático. Este último permite mantener los objetos centrados al compensar la rotación de la Tierra, lo que facilita la observación con telescopio o la captura de fotografías de larga exposición.
Ajuste de Vref (voltaje de referencia).
En términos prácticos, el Vref define el comportamiento del motor. Si el valor es demasiado bajo, el motor no tendrá suficiente fuerza: puede vibrar, perder pasos o incluso no girar. Si es demasiado alto, el motor y el driver se calientan en exceso, lo que puede causar inestabilidad o incluso dañar los componentes. Por ello, es un ajuste crítico: representa el equilibrio entre torque y seguridad.
Para la combinación de driver y motor que utilicé, un Vref de 0.58 V resultó ideal. Para otras configuraciones, este valor debe calcularse.
El ajuste lo realicé con un multímetro. Con el sistema energizado, se coloca la punta negra en tierra (GND) y la roja en el tornillo del potenciómetro del driver. Si el valor no es el adecuado, se debe girar ligeramente el tornillo: en una dirección aumenta el voltaje y en la otra disminuye. Es importante hacer ajustes pequeños y medir cada vez, ya que el tornillo es muy sensible.
Una vez calibrado correctamente, el motor debe girar de forma suave, sin vibraciones ni bloqueos.
Código
El código fue escrito y cargado al microcontrolador utilizando el IDE de Arduino.
El aspecto más importante fue calcular el número de pasos necesarios para que el montaje se mueva a la velocidad correcta. Para ello, considere varios factores:
El motor tiene 200 pasos por revolución. En este proyecto se utilizó microstepping 1/16, lo que equivale a 3200 micropasos por vuelta completa.
El sistema de engranes consta de dos etapas:
- De 10 dientes a 60 dientes
- De 15 dientes a 60 dientes (este último mueve el eje del telescopio)
En la primera etapa, el motor debe girar 6 veces (60/10) para que el engrane siguiente complete una vuelta.
En la segunda etapa, el engrane de 15 dientes debe girar 4 veces (60/15) para que el engrane final complete una vuelta.
Por lo tanto, el motor debe dar 24 vueltas (6 × 4) para que el telescopio complete una rotación completa.
Considerando los 3200 micropasos por vuelta, el total es de 76,800 pasos por revolución del telescopio.
Este movimiento debe completarse en 23 horas, 56 minutos y 4 segundos (un día sideral), equivalentes a 86,164 segundos o 86,164,000 milisegundos.
Esto implica que cada paso debe ejecutarse aproximadamente cada 1122 milisegundos.
Una vez definido este valor, el código interpreta las interacciones de los botones y las traduce en movimientos del motor a través del driver. El código completo se encuentra disponible en el siguiente enlace:
https://drive.google.com/file/d/1UUWnr-ov3nblj7EVW8HvU8cFYrwHzdD5/view?usp=sharing
Primer encendido completo
Una vez ensambladas todas las piezas, armado el control y cargado el código, el sistema funcionó conforme a lo planeado. A continuación se muestra un video del montaje en operación.
Para utilizar el montaje correctamente, es necesario apuntarlo hacia la estrella polar. Esto puede hacerse con ayuda de una brújula. En mi caso, el ángulo del montaje es fijo, por lo que únicamente es necesario verificar que esté nivelado, lo cual puede hacerse con un nivel.
Conclusiones
Este proyecto es distinto a los que normalmente realizo, ya que no involucra directamente analítica de datos. Sin embargo, fue sumamente gratificante, pues planteó problemas matemáticos muy interesantes, desde conceptos astronómicos hasta cálculos de relaciones de engranes.
Además, me permitió profundizar en modelado e impresión 3D, así como ampliar mis conocimientos en electrónica y programación de microcontroladores.
Es probable que esta sea la última entrega de la serie, aunque no descarto una publicación adicional cuando desarrolle la versión final del control.