
En la publicación anterior hablé acerca de las bases que rigen el desplazamiento del cielo nocturno y cómo el montaje ecuatorial sirve como una solución a este fenómeno.
Un montaje ecuatorial puede utilizarse tanto para observación como para fotografía astronómica, es decir, montando un telescopio o una cámara digital. En ambos casos resolvemos el mismo inconveniente; sin embargo, para fotografías de larga exposición es prácticamente obligatorio si queremos que los cuerpos celestes aparezcan fijos.
El diseño original
El diseño original es del Ingeniero mecánico Simon Rob, quien documentó extensamente su proyecto en el siguiente enlace:
https://www.instructables.com/Equatorial-Mount-for-DSLR/
Sin embargo, el diseño que yo tomé como referencia es una modificación del original, realizada por el usuario SirFixalotFPV en Thingiverse. Sus aportaciones se encuentran publicadas en el siguiente enlace:
https://www.thingiverse.com/thing:4593838
Un aspecto funcional importante es que el diseño original incorpora dos botones que sirven para encender y apagar el seguimiento automático. Por otro lado, la modificación mantiene el seguimiento automático siempre encendido y no permite apagarlo.
Que decidí modificar
Decidí tomar como base la parte mecánica del segundo diseño y la parte funcional del original. No obstante, en ambos apartados realicé algunas modificaciones.
En la parte física / estructural:
- Agregué una base desmontable.
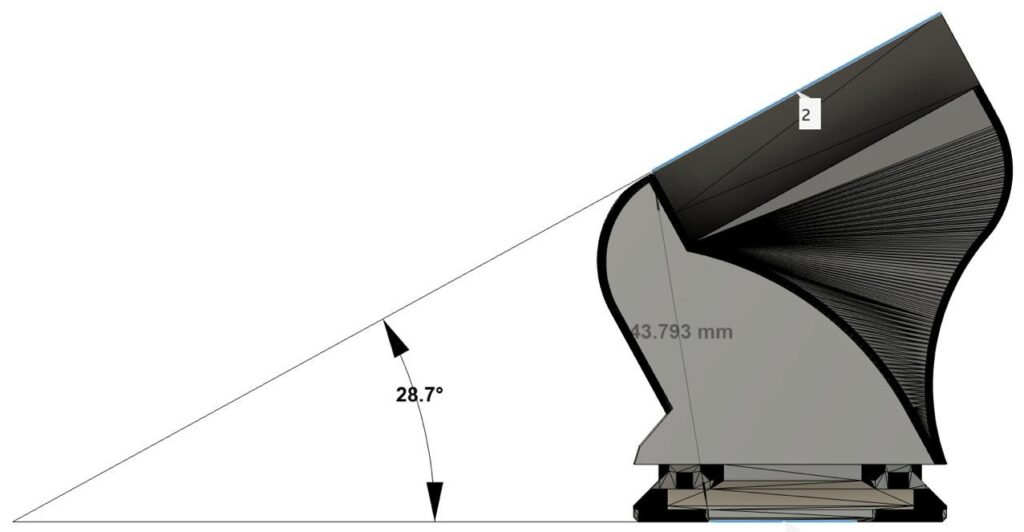
- Modifiqué la inclinación de la base del montaje, que originalmente era de 46.1 grados, a 28.7 grados (mi latitud).
- Agregué una placa a la base del montaje que encaja en la base desmontable.
- Incorporé una terminación de seguridad en la varilla de equilibrio.
En la parte funcional:
- En lugar de dos botones para el seguimiento automático, dejé únicamente uno que funciona como encendido/apagado, acompañado de un solo LED para indicar el estado.
- Incorporé dos botones adicionales para girar el motor manualmente y ayudarme a centrar objetos con mayor precisión.
- Cambié el driver del motor de un ULN2003 a un A4988.
- Incorporé un capacitor de 220 µF – 25 V para proteger el driver y el microcontrolador.
Lista de materiales estructurales
Para realizar las modificaciones a las piezas utilicé el software Autodesk Fusion, que puede descargarse en el siguiente enlace:
https://www.autodesk.com/products/fusion-360/personal
La base y los engranes están impresos en PETG con una impresora 3D. Todos los archivos se encuentran disponibles en el siguiente enlace:
https://drive.google.com/drive/folders/19cQDaZVi9Am6A89mRqs8IcMT4fFw2dKm?usp=sharing
Una vez impresas las piezas, estos son los materiales adicionales necesarios para el ensamblaje:
- Kit de tornillos y tuercas M3
- Varilla roscada de 5/16” de 45 cm
- 30 arandelas de 5/16” x 1-1/2”
- 3 tuercas de 5/16”
- 2 tuercas mariposa de 5/16”
- 1 tornillo de 5/16” x 2-3/4”
- 2 baleros 6200
- 2 baleros 608ZZ
- 1 tubo rígido de 10 mm de diámetro por 10 cm de largo
- 1 soporte para cámara con cabeza giratoria
- Pinzas
- Llaves Allen
Lista de materiales electrónicos
| Componente | Cantidad |
| Fuente DC 12V con salida adicional 5V regulada | 1 |
| Capacitor electrolítico 220µF 25V | 1 |
| Arduino Nano | 1 |
| Driver A4988 | 1 |
| Motor NEMA 17 | 1 |
| Botones Push | 3 |
| LED azul | 1 |
| Resistencia 220Ω | 1 |
| Protoboard | 1 |
Otros
- Cables Dupont
- Computadora con Arduino IDE instalado
Siguientes pasos
Hasta aquí cubro todas las partes preliminares. En la siguiente publicación abordaré el armado del montaje, así como las conexiones electrónicas y el código necesario para que todo funcione correctamente.